Forecasting with Dynamic Linear Model (DLM)¶
Among state space models, Dynamic Linear Model (DLM) are one of the most popular models due to its explainability and ability to incorporate regressors with dynamic coefficients. Literature such as Harvey (1989) and Durbin and Koopman (2002) provide a complete review on the models. This notebook introduces a way to construct a vanlia DLM through Pyro and Forecaster modules. In the end, it provides an extension to incorporate flexible coefficients priors.
See also: - Forecasting II: state space models
Workflow¶
data simulation
visualization of coefficients and response
Standard DLM training and validation
posteriors comparison
holdout validation
DLM with coefficients priors at various time points
posteriors comparison
holdout validation
[1]:
import matplotlib.pyplot as plt
import pandas as pd
import numpy as np
import torch
import pyro
import pyro.distributions as dist
import pyro.poutine as poutine
from pyro.contrib.forecast import ForecastingModel, Forecaster, eval_crps
from pyro.infer.reparam import LocScaleReparam
from pyro.ops.stats import quantile
%matplotlib inline
assert pyro.__version__.startswith('1.9.1')
pyro.set_rng_seed(20200928)
pd.set_option('display.max_rows', 500)
plt.style.use('fivethirtyeight')
Data Simulation¶
Assume we have observation \(y_t\) at time \(t\) such that
where
\(x_t\) is a P x 1 vector of regressors at time \(t\)
\(\beta_t\) is a P x 1 vector of latent coefficients at time \(t\) following a random walk distribution
\(\epsilon\) is the noise at time \(t\)
We then simulate data in following distribution:
[2]:
torch.manual_seed(20200101)
# number of predictors, total observations
p = 5
n = 365 * 3
# start, train end, test end
T0 = 0
T1 = n - 28
T2 = n
# initializing coefficients at zeros, simulate all coefficient values
beta0 = torch.empty(n, 1).normal_(0, 0.1).cumsum(0)
betas_p = torch.empty(n, p).normal_(0, 0.02).cumsum(0)
betas = torch.cat([beta0, betas_p], dim=-1)
# simulate regressors
covariates = torch.cat(
[torch.ones(n, 1), torch.randn(n, p) * 0.1],
dim=-1
)
# observation with noise
y = ((covariates * betas).sum(-1) + 0.1 * torch.randn(n)).unsqueeze(-1)
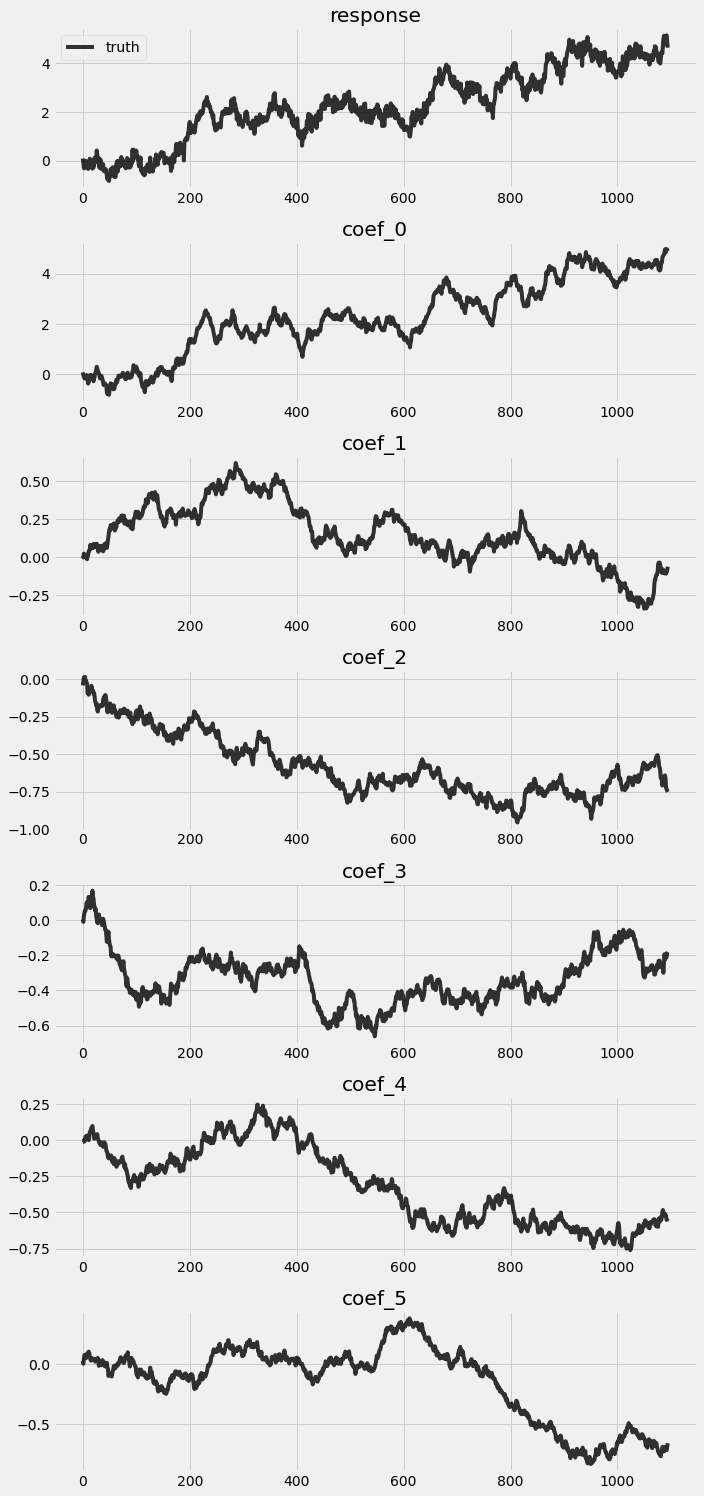
Visualization of response and coefficients¶
Let’s take a look on the truth simulated from the previous block.
[3]:
fig, axes = plt.subplots(p + 2, 1, figsize=(10, 3 * (p + 2)))
for idx, ax in enumerate(axes):
if idx == 0:
axes[0].plot(y, 'k-', label='truth', alpha=.8)
axes[0].legend()
axes[0].set_title('response')
else:
axes[idx].plot(betas[:, idx - 1], 'k-', label='truth', alpha=.8)
axes[idx].set_title('coef_{}'.format(idx - 1))
plt.tight_layout()
Train and validate a vanilla DLM¶
Let’s build a vanilla DLM following the dynmics we discussed previously.
[4]:
class DLM(ForecastingModel):
def model(self, zero_data, covariates):
data_dim = zero_data.size(-1)
feature_dim = covariates.size(-1)
drift_scale = pyro.sample("drift_scale", dist.LogNormal(-10, 10).expand([feature_dim]).to_event(1))
with self.time_plate:
with poutine.reparam(config={"drift": LocScaleReparam()}):
drift = pyro.sample("drift", dist.Normal(torch.zeros(covariates.size()), drift_scale).to_event(1))
weight = drift.cumsum(-2) # A Brownian motion.
# record in model_trace
pyro.deterministic("weight", weight)
prediction = (weight * covariates).sum(-1, keepdim=True)
assert prediction.shape[-2:] == zero_data.shape
# record in model_trace
pyro.deterministic("prediction", prediction)
scale = pyro.sample("noise_scale", dist.LogNormal(-5, 10).expand([1]).to_event(1))
noise_dist = dist.Normal(0, scale)
self.predict(noise_dist, prediction)
[5]:
%%time
pyro.set_rng_seed(1)
pyro.clear_param_store()
model = DLM()
forecaster = Forecaster(
model,
y[:T1],
covariates[:T1],
learning_rate=0.1,
learning_rate_decay=0.05,
num_steps=1000,
)
INFO step 0 loss = 7.11372e+10
INFO step 100 loss = 174.352
INFO step 200 loss = 2.06682
INFO step 300 loss = 1.27919
INFO step 400 loss = 1.15015
INFO step 500 loss = 1.34206
INFO step 600 loss = 0.928436
INFO step 700 loss = 1.00953
INFO step 800 loss = 1.04599
INFO step 900 loss = 0.870245
CPU times: user 8.16 s, sys: 39.7 ms, total: 8.2 s
Wall time: 8.22 s
Posteriors comparison¶
We extract posteriors during the in-sample period and compare them against the truth.
[6]:
pyro.set_rng_seed(1)
# record all latent variables in a trace
with poutine.trace() as tr:
forecaster(y[:T1], covariates[:T1], num_samples=100)
# extract the values from the recorded trace
posterior_samples = {
name: site["value"]
for name, site in tr.trace.nodes.items()
if site["type"] == "sample"
}
We can also visualize the in-sample posteriors.
[7]:
# overlay estimations with truth
fig, axes = plt.subplots(p + 2, 1, figsize=(10, 3 * (p + 2)))
# posterior quantiles of latent variables
pred_p10, pred_p50, pred_p90 = quantile(posterior_samples['prediction'], (0.1, 0.5, 0.9)).squeeze(-1)
# posterior quantiles of latent variables
coef_p10, coef_p50, coef_p90 = quantile(posterior_samples['weight'], (0.1, 0.5, 0.9)).squeeze(-1)
for idx, ax in enumerate(axes):
if idx == 0:
axes[0].plot(y[:T1], 'k-', label='truth', alpha=.8, lw=1)
axes[0].plot(pred_p50, 'r-', label='estimate', alpha=.8, lw=1)
axes[0].fill_between(torch.arange(0, T1), pred_p10, pred_p90, color="red", alpha=.3)
axes[0].legend()
axes[0].set_title('response')
else:
axes[idx].plot(betas[:T1, idx - 1], 'k-', label='truth', alpha=.8, lw=1)
axes[idx].plot(coef_p50[:, idx - 1], 'r-', label='estimate', alpha=.8, lw=1)
axes[idx].fill_between(torch.arange(0, T1), coef_p10[:, idx-1], coef_p90[:, idx-1], color="red", alpha=.3)
axes[idx].set_title('coef_{}'.format(idx - 1))
plt.tight_layout()
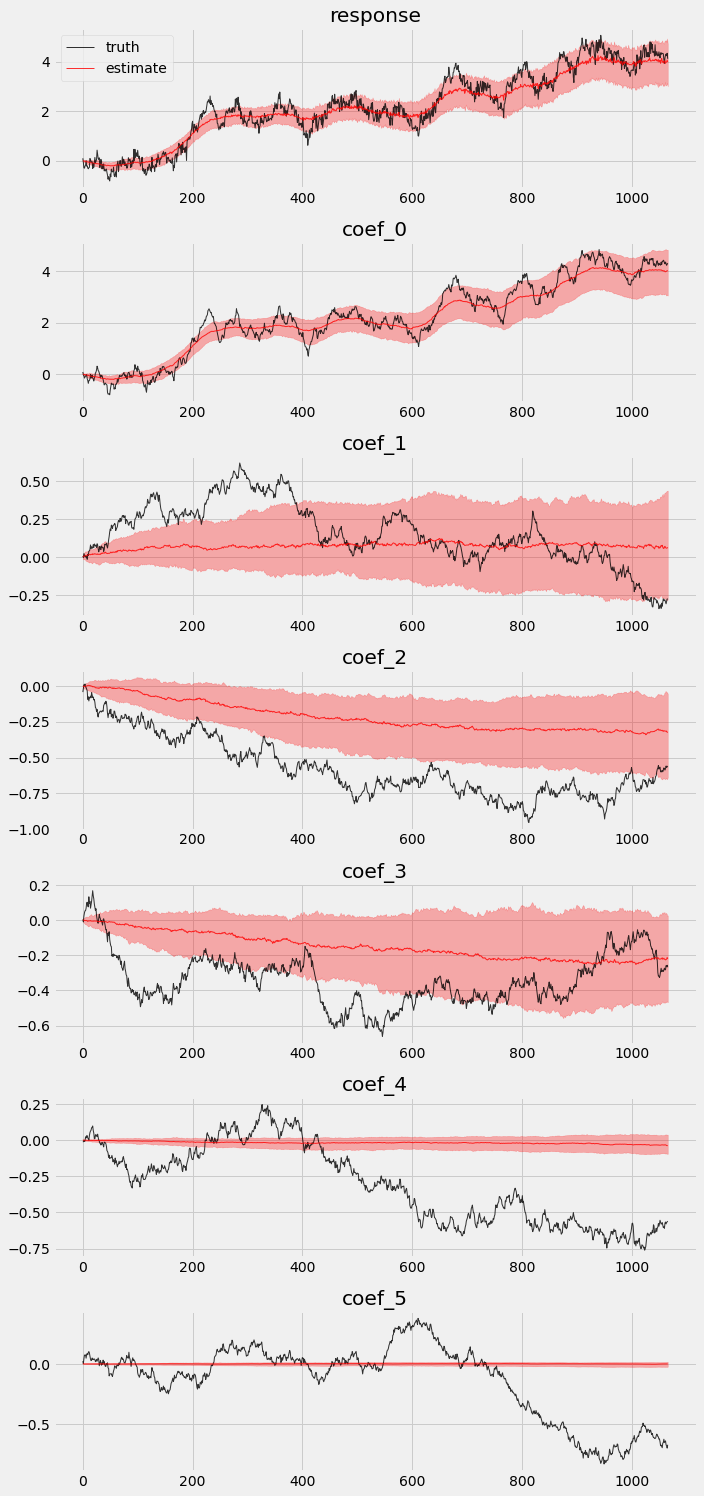
We can see that not all coefficients can be recovered in the vanilla model.
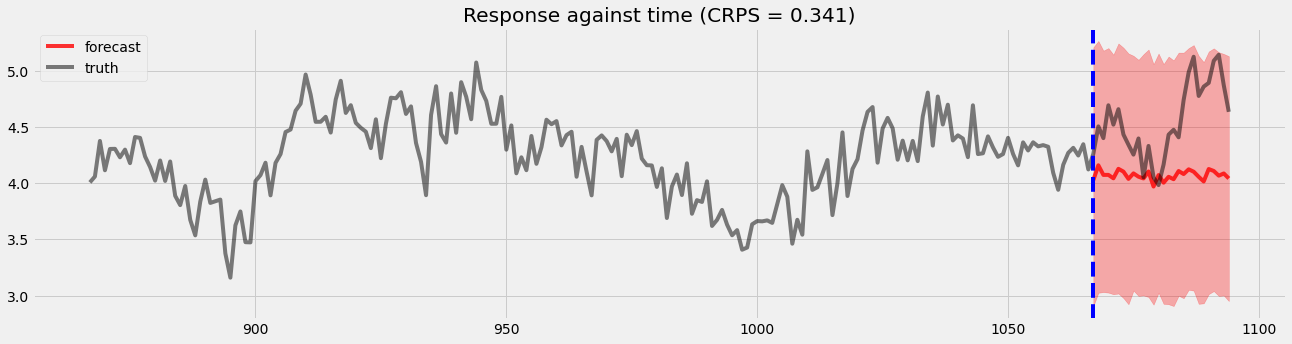
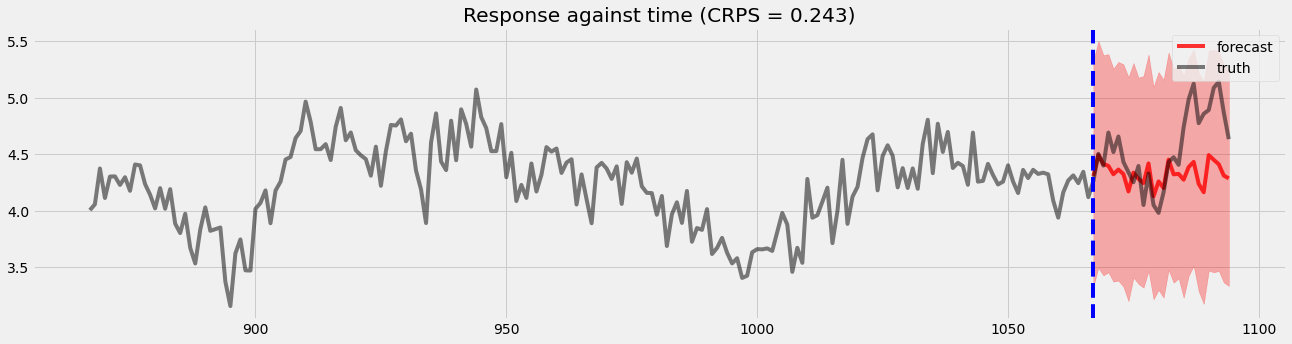
Holdout validation¶
Here, we will visualize the holdout validation for comparison later.
[8]:
pyro.set_rng_seed(1)
samples = forecaster(y[:T1], covariates, num_samples=1000)
p10, p50, p90 = quantile(samples, (0.1, 0.5, 0.9)).squeeze(-1)
crps = eval_crps(samples, y[T1:])
plt.figure(figsize=(20, 5))
plt.fill_between(torch.arange(T1, T2), p10, p90, color="red", alpha=.3)
plt.plot(torch.arange(T1, T2), p50, 'r-', label='forecast', alpha=.8)
plt.plot(np.arange(T1 - 200, T2), y[T1 - 200:T2], 'k-', label='truth', alpha=.5)
plt.title("Response against time (CRPS = {:0.3g})".format(crps))
plt.axvline(T1, color='b', linestyle='--')
plt.legend(loc="best");
Train a DLM with coefficients priors at various time points¶
Sometime user may have prior beliefs of certain coefficients at certain time point. This can be useful in cases where modelers can set an informative prior for those coefficients. For illustration, we create a simple evenly distributed time points and set priors on those points with the known value \(B_t\) as such
where \(t \in [t_1, t_2, ... t_n]\) and \([t_1, t_2, ... t_n]\) are the time points we have experiential results.
[9]:
# let's provide some priors
time_points = np.concatenate((
np.arange(300, 320),
np.arange(600, 620),
np.arange(900, 920),
))
# broadcast on time-points
priors = betas[time_points, 1:]
[10]:
print(time_points.shape, priors.shape)
(60,) torch.Size([60, 5])
Model Training¶
Now, let’s construct the new DLM which allows user import coefficents prior at certain time points.
[11]:
class DLM2(ForecastingModel):
def model(self, zero_data, covariates):
data_dim = zero_data.size(-1)
feature_dim = covariates.size(-1)
drift_scale = pyro.sample("drift_scale", dist.LogNormal(-10, 10).expand([feature_dim]).to_event(1))
with self.time_plate:
with poutine.reparam(config={"drift": LocScaleReparam()}):
drift = pyro.sample("drift", dist.Normal(torch.zeros(covariates.size()), drift_scale).to_event(1))
weight = drift.cumsum(-2) # A Brownian motion.
# record in model_trace
pyro.deterministic("weight", weight)
# This is the only change from the simpler DLM model.
# We inject prior terms as if they were likelihoods using pyro observe statements.
for tp, prior in zip(time_points, priors):
pyro.sample("weight_prior_{}".format(tp), dist.Normal(prior, 0.5).to_event(1), obs=weight[..., tp:tp+1, 1:])
prediction = (weight * covariates).sum(-1, keepdim=True)
assert prediction.shape[-2:] == zero_data.shape
# record in model_trace
pyro.deterministic("prediction", prediction)
scale = pyro.sample("noise_scale", dist.LogNormal(-5, 10).expand([1]).to_event(1))
noise_dist = dist.Normal(0, scale)
self.predict(noise_dist, prediction)
[12]:
%%time
pyro.set_rng_seed(1)
pyro.clear_param_store()
model = DLM2()
forecaster2 = Forecaster(
model,
y[:T1],
covariates[:T1],
learning_rate=0.1,
learning_rate_decay=0.05,
num_steps=1000,
)
INFO step 0 loss = 7.11372e+10
INFO step 100 loss = 105.237
INFO step 200 loss = 2.21884
INFO step 300 loss = 1.70493
INFO step 400 loss = 1.64291
INFO step 500 loss = 1.80583
INFO step 600 loss = 0.903905
INFO step 700 loss = 1.25712
INFO step 800 loss = 1.10254
INFO step 900 loss = 0.926691
CPU times: user 36.6 s, sys: 316 ms, total: 36.9 s
Wall time: 37.2 s
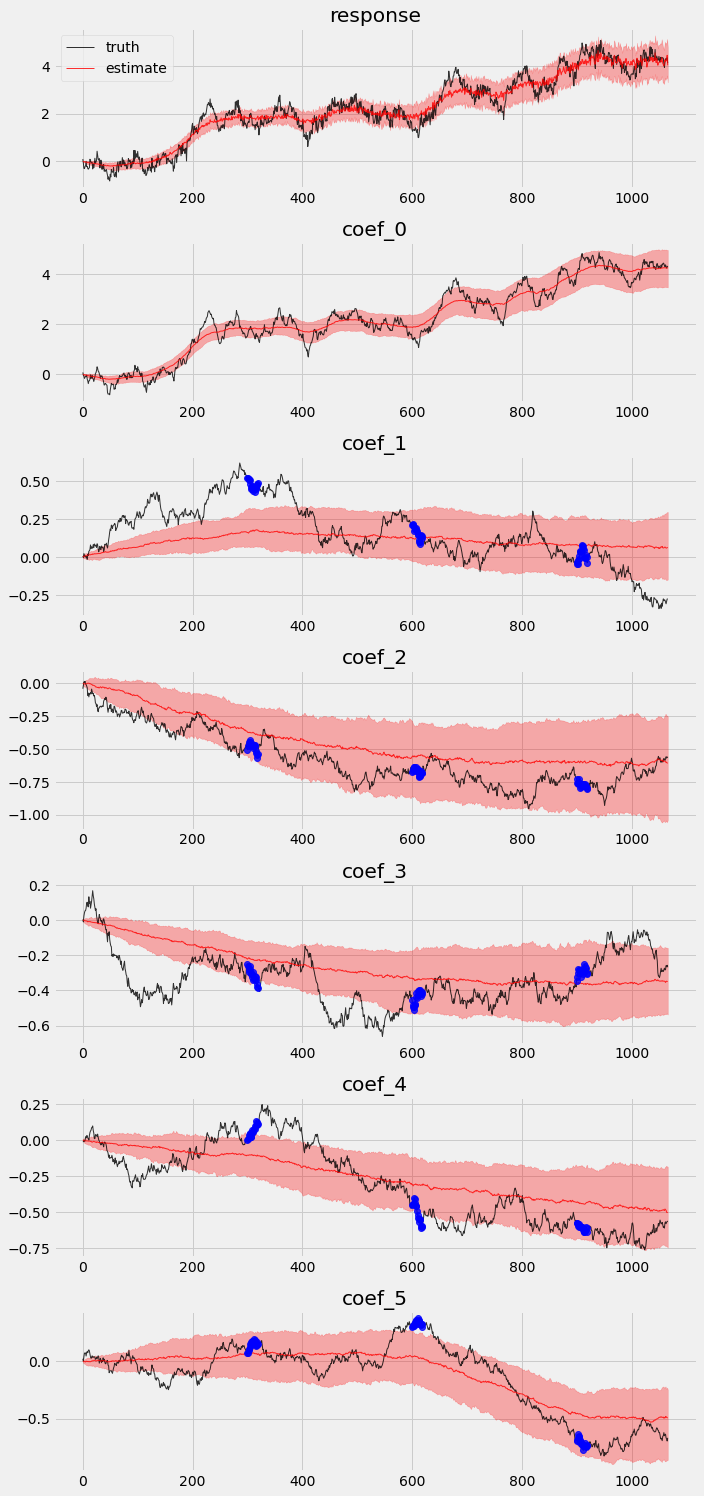
Posterior comparison¶
Finally, let’s redo the exercise we did in previous section to check in-sample posteriors and holdout validation.
[13]:
pyro.set_rng_seed(1)
with poutine.trace() as tr:
forecaster2(y[:T1], covariates[:T1], num_samples=100)
posterior_samples2 = {
name: site["value"]
for name, site in tr.trace.nodes.items()
if site["type"] == "sample"
}
[14]:
# overlay estimations with truth
fig, axes = plt.subplots(p + 2, 1, figsize=(10, 3 * (p + 2)))
# posterior quantiles of latent variables
pred_p10, pred_p50, pred_p90 = quantile(posterior_samples2['prediction'], (0.1, 0.5, 0.9)).squeeze(-1)
# posterior quantiles of latent variables
coef_p10, coef_p50, coef_p90 = quantile(posterior_samples2['weight'], (0.1, 0.5, 0.9)).squeeze(-1)
for idx, ax in enumerate(axes):
if idx == 0:
axes[0].plot(y[:T1], 'k-', label='truth', alpha=.8, lw=1)
axes[0].plot(pred_p50, 'r-', label='estimate', alpha=.8, lw=1)
axes[0].fill_between(torch.arange(0, T1), pred_p10, pred_p90, color="red", alpha=.3)
axes[0].legend()
axes[0].set_title('response')
else:
axes[idx].plot(betas[:T1, idx - 1], 'k-', label='truth', alpha=.8, lw=1)
axes[idx].plot(coef_p50[:, idx - 1], 'r-', label='estimate', alpha=.8, lw=1)
if idx >= 2:
axes[idx].plot(time_points, priors[:, idx-2], 'o', color='blue', alpha=.8, lw=1)
axes[idx].fill_between(torch.arange(0, T1), coef_p10[:, idx-1], coef_p90[:, idx-1], color="red", alpha=.3)
axes[idx].set_title('coef_{}'.format(idx - 1))
plt.tight_layout()
Holdout validation¶
[15]:
pyro.set_rng_seed(1)
samples2 = forecaster2(y[:T1], covariates, num_samples=1000)
p10, p50, p90 = quantile(samples2, (0.1, 0.5, 0.9)).squeeze(-1)
crps = eval_crps(samples2, y[T1:])
print(samples2.shape, p10.shape)
plt.figure(figsize=(20, 5))
plt.fill_between(torch.arange(T1, T2), p10, p90, color="red", alpha=.3)
plt.plot(torch.arange(T1, T2), p50, 'r-', label='forecast', alpha=.8)
plt.plot(np.arange(T1 - 200, T2), y[T1 - 200:T2], 'k-', label='truth', alpha=.5)
plt.title("Response against time (CRPS = {:0.3g})".format(crps))
plt.axvline(T1, color='b', linestyle='--')
plt.legend(loc="best");
torch.Size([1000, 28, 1]) torch.Size([28])
We can see there is an obvious improvement in both coefficients movement detection and holoud validation.
Conclusion¶
We show how to create a classic DLM with Pyro that provides decent forecast result.
With priors injection, we improve the model in getting more accurate coefficients and predictions.
Reference¶
Harvey, C. A. (1989). Forecasting, Structural Time Series and the Kalman Filter, Cambridge University Press.
Durbin, J., Koopman, S. J.. (2001). Time Series Analysis by State Space Methods, Oxford Statistical Science Series
Scott, S. L., and Varian, H. (2015). “Inferring Causal Impact using Bayesian Structural Time-Series Models” The Annals of Applied Statistics, 9(1), 247–274.
Moore, D., Burnim, J, and the TFP Team (2019). “Structural Time Series modeling in TensorFlow Probability” Available at https://blog.tensorflow.org/2019/03/structural-time-series-modeling-in.html